Abstract
We introduce Exemplar VAE, a generalization of kernel density
estimation using neural netowrks. Exemplar VAE is a variant of VAE
with a non-parametric prior in the latent space based on a Parzen
window estimator. To sample from it, one first draws a random
exemplar from a training set, then stochastically transforms that
exemplar into a latent code and a new observation. We propose
retrieval augmented training (RAT) as a way to speed up Exemplar VAE
training by using approximate nearest neighbor search in the latent
space to define a lower bound on log marginal likelihood. To enhance
generalization, model parameters are learned using exemplar
leave-one-out and subsampling. Experiments demonstrate the
effectiveness of Exemplar VAEs on density estimation and
representation learning. Importantly, generative data augmentation
using Exemplar VAEs on permutation invariant MNIST and Fashion MNIST
reduces classification error of simple MLPs from 1.17% to 0.69% and
from 8.56% to 8.16%.
Motivation
Consider the problem of conditional image generation, given a natural
language description of a scene such as:
''A woman is staring at Monet's Water Lilies''.
There are two general classes of methods for addressing this problem.
One can resort to exemplar based methods, e.g., using web search engines to
retrieve photographs with similar captions,
and then editing the retrieved images to generate new ones.
Alternatively, one can adopt parametric models such as deep neural
networks optimized for text to image translation to synthesize new relevant scenes.
Exemplar based methods depend on large and diverse datasets of
exemplars and relatively simple machine learning algorithms, such as
Parzen window
estimation
Parametric generative models based on deep neural nets enable learning
complex data distributions across myriad problem
domains (e.g.,
This work presents a probabilistic framework for exemplar based generative modeling using expressive neural nets. This framework combines the advantages of both exemplar based and parametric methods in a principled way and achieves superior results. We focus on simple unconditional generation tasks here, but the learning formulation and the methods developed are applicable to other applications including text to image translation and language modeling.
Exemplar Generative Model
\(
\renewcommand{\vec}[1]{\boldsymbol{\mathbf{#1}}}
\def\expected{\mathbb{E}}
\def\t{T}
\def\x{\vec{x}}
\def\z{\vec{z}}
\def\eg{{e.g.,} ~}
\def\ie{{i.e.,} ~}
\newcommand{\one}[1]{{1}_{[#1]}}
\)
We define an exemplar based generative model in terms of a dataset of
\(N\) exemplars, \(X \equiv \{\x_n\}_{n=1}^N\), and a parametric transition
distribution, \(\t_\theta(\x \mid \x')\), which stochastically transforms
an exemplar \(\x'\) into a new observation \(\x\). The log density of a data point
\(x\) under an exemplar based generative model \(\{X, \t_\theta\}\) is expressed as
\begin{equation}
\log p(\x \mid X, \theta) ~=~ \log \sum\nolimits_{n=1}^N\frac{1}{N} \t_\theta(\x \mid \x_n) ~,
\label{eq:exgen}
\end{equation}
where we assume the prior probability of selecting each exemplar is uniform.
The transition distribution \(\t_\theta(\x \mid \x')\) can be defined using any expressive
parametric generative model, including VAEs, Normalizing Flow and auto-regressive models.
Consistent with recent work
Leave-one-out during training
The generation of a given data point is expressed in terms of all exemplars except that point. The non-parametric nature of the generative model enables easy adoption of such a leave-one-out (LOO) objective during training, to optimize \begin{equation} O_1(\theta; X) ~=~ %\frac{1}{N} \sum_{i=1}^N \log \sum_{n=1}^N \frac{\one{i \neq n}}{N\!-\!1} \t_\theta(\x_i \mid \x_n)~, \end{equation} where \(\one{i \neq n} \in \{0, 1\}\) is an indicator function taking the value of 1 if and only if \(i \neq n\).
Exemplar subsampling during training
In addition to LOO, we observe that explaining a training point using a subset of the remaining training exemplars improves generalization. To that end we use a hyper-parameter \(M\) to define the exemplar subset size for the generative model. To generate \(\x_i\) we draw \(M\) exemplar indices, denoted \(\pi \equiv \{\pi_m\}_{m=1}^M\), uniformly at random from subsets of \(\{1, \ldots, i-1, i+1, \ldots, N\}\). Let \(\pi \sim \Pi^{N,i}_{M}\) denote this sampling procedure with (\(N\!-\!1\) choose \(M\)) possible subset outcomes. Combining LOO and exemplar subsampling, the objective takes the form \begin{equation} O_2(\theta; X) ~=~ %\frac{1}{N} \sum_{i=1}^N \mathop{\expected~~~~~~~~~}_{\pi\sim~\Pi^{N,i}_{M}} \log \sum_{m=1}^M %\one{i \neq \pi_m} \frac{1}{M} \t_\theta(\x_i \mid \x_{\pi_m}) ~. \label{eq:obj2} \end{equation}
Exemplar VAE
We present theExemplar VAE as an instance of neural exemplar based generative models,
in which the transition distribution in which \(\t(\x
\mid \x')\) is defined in terms of the encoder \(r_\phi\) and
the decoder \(p_\theta\) of a VAE
\begin{equation}
\t(\x \mid \x') ~=~ \int_z r_\phi(\z \mid \x') \,p_\theta(\x \mid \z)\, d\z~.
\end{equation}
The Exemplar VAE assumes that, given \(\z\), an observation \(\x\) is
conditionally independent from the associated exemplar \(\x'\). This
conditional independence assumption helps simplify the formulation,
enabling efficient optimization. Marginalizing out the exemplar index \(n\) and the latent variable \(\z\),
we derive an evidence lower bound (ELBO)
Experiments
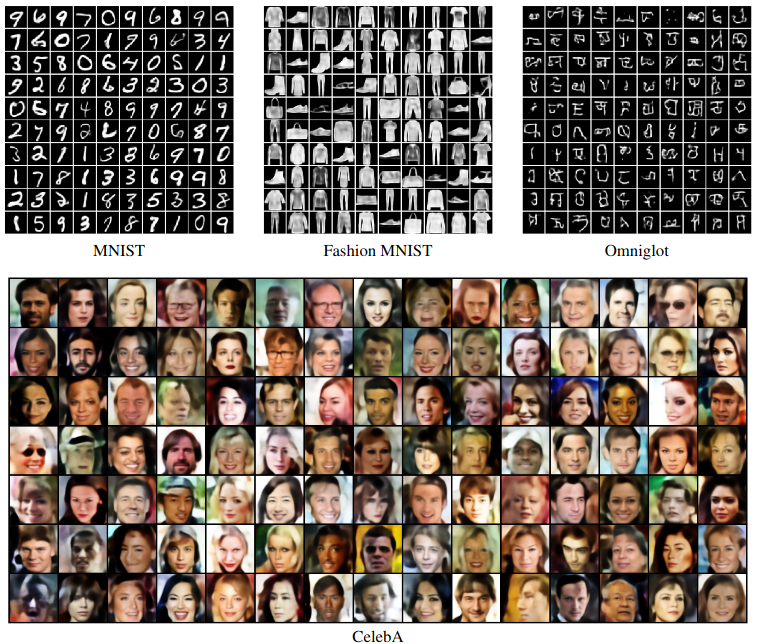
To assess the effectiveness of Exemplar VAEs we conduct three sets of experiments, on density estimation, represenation learning, and unsupervised data augmentation.
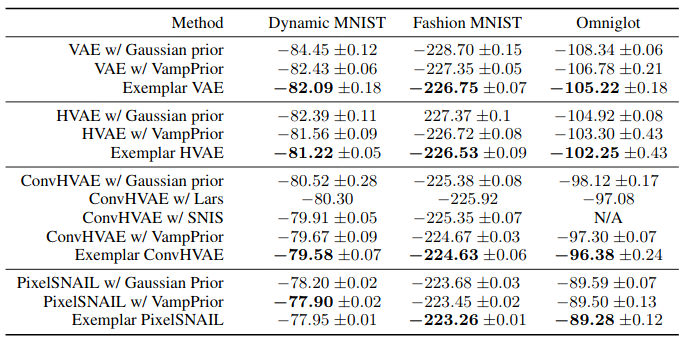
Density Estimation
We report density estimation with MNIST, Omniglot and Fashion MNIST,
using three different architectures, namely VAE, HVAE and ConvHVAE
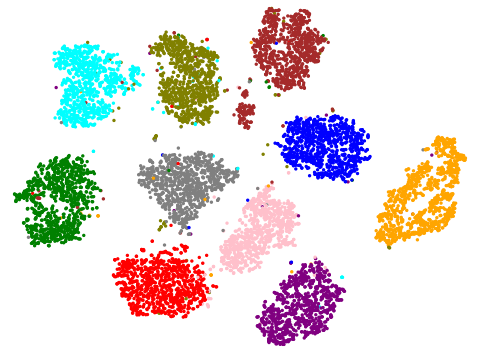
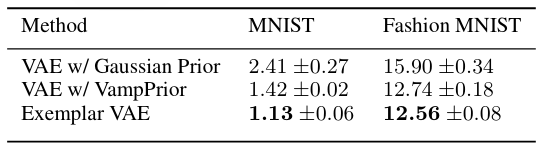
Representation Learning
We next explore the structure of the latent representation for Exemplar VAE. Images below show a t-SNE visualization of the latent representations of MNIST test data for the Exemaplar VAE and for VAE with a Gaussian prior.

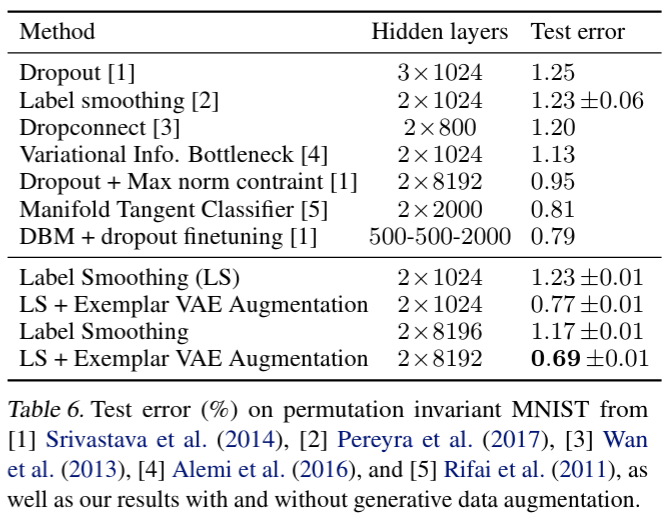
Generative Data Augmentation
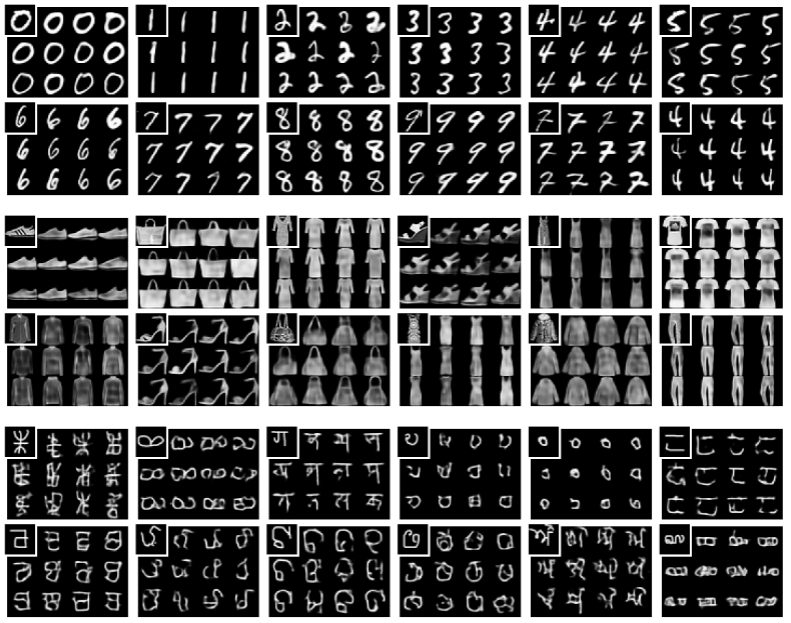
We assess the effectiveness of the Exemplar VAE for generating augmented data to improve supervised learning. Recent generative models have achieved impressive sample quality and diversity, but they have seen limited success in improving discriminative models. In our experiments we use the training data points as exemplars and generate additional samples from the Exemplar VAE. Class labels of the exemplars are transferred to corresponding new images, and a combination of real and generated data is used for training.
Exemplar-conditioned Samples